Keywords: Walk, Reaching and Grasping
This is the Chapter9 ReadingNotes from book Computer Animation_ Algorithms and Techniques_ Parent-Elsevier (2012).
Overview of virtual human representation
Representing body geometry
The vast majority of human figures are modeled using a boundary representation constructed from either polygons (often triangles) or patches (usually nonuniform rational B-splines; NURBS).
If the figure is constructed for real-time display in a game on a low-end PC or gaming console, usually it will be assembled from a relatively low number of triangular polygons, which, while giving a chunky appearance to the model, can be rendered quickly.
If the figure will be used in an animation that will be rendered off-line by a high-end rendering package, it might be modeled with NURBS patch data, to obtain smooth curved contours.
Polygonal representations
When multiple objects are used, they are generally arranged in a hierarchy of joints and rigid segments. Rotating a joint rotates all of that joint’s children (e.g., rotating a hip joint rotates all of the child’s leg segments and joints around the hip).
If a single mesh is used, then rotating a joint must deform the vertices surrounding that joint, as well as rotate the vertices in the affected limb.
Patch representations
While patches can easily provide much smoother surfaces than polygons in general, it is more challenging to add localized detail to a figure without adding a great deal of more global data. Hierarchical splines provide a partial solution to this problem [21].
Other representations
Implicit surfaces (Chapter 12.1) can be employed as sculpting material for building virtual humans. Frequently the term “metaballs” is used for spherical implicit surfaces.
Geometry data acquisition
Data representing a specific individual are often captured using a laser scanner or by performing image processing on video images.(三维重建)
Geometry deformation
Body parts are arranged in a hierarchy of joints and segments such that rotating a joint rotates all of the child segments and joints beneath it in the hierarchy [31]. While this method is quick, it yields suboptimal visual results at the joints, particularly if the body is textured, because the rigid parts merely overlap and occlude each other at the joint.
When a bone rotates, the vertices move along with it [7]. Better results can be obtained, at the cost of additional computation, if the vertices surrounding a joint are weighted so that their position is affected by multiple bones [41].
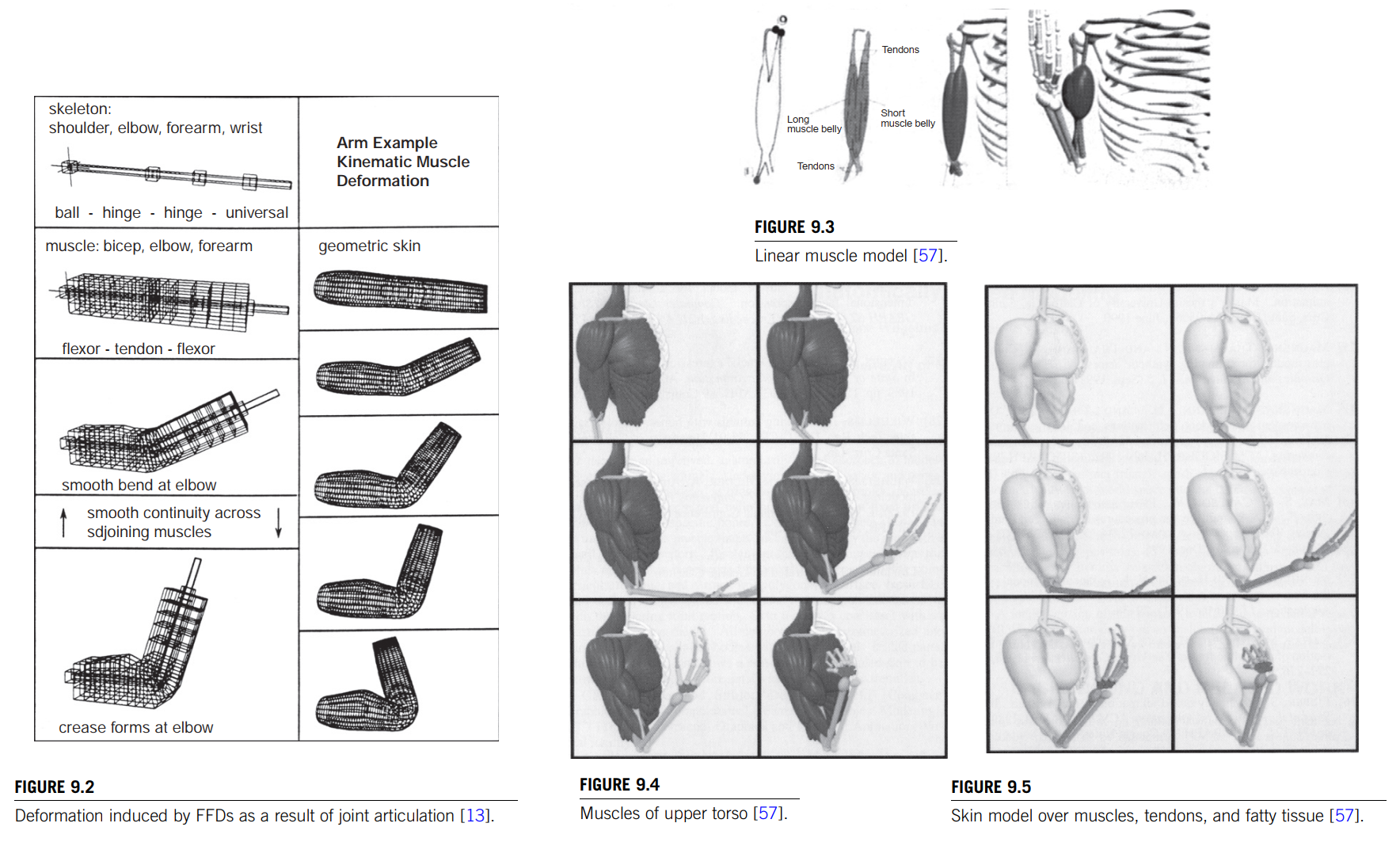
While weighting the effects of bone rotations on vertices results in smoother skin around joints, severe problems can still occur with extreme joint bends.FFDs have been used in this case to simulate the skin-on-skin collision and the accompanying squashing and bulging that occur when a joint such as the elbow is fully bent [13].
Surface deformations that would be caused by changes in underlying material, such as muscle and fat in a real human, can be produced in a virtual human by a number of means. Methods range from those that simply allow an animator to specify muscular deformations [13] to those that require complex dynamics simulations of the various tissue layers and densities [49] [57].
Surface detail
skin, wrinkles etc.
Layered approach to human figure modeling
A common approach to animating the human figure is to construct the figure in layers consisting of skeleton, muscles, and skin.
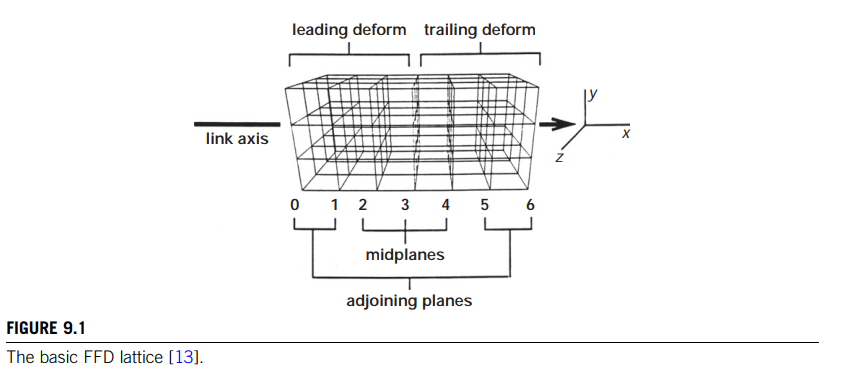
The muscle layer implements a system of FFD lattices in which the surface geometry is embedded. The lattice is organized with two planes on each end that are responsible for maintaining continuity with adjoining lattices, and the interior planes are responsible for deforming the skin to simulate muscle bulging (Figure 9.1).
Rigging
Rigging, as used here, refers to setting up interactive controls to facilitate animation of a character or other object.
Reaching and grasping
Modeling the arm

The shoulder joint
The hand
Coordinated movement
Reaching around obstacles
Strength
Walking
An aspect of walking that complicates its analysis and generation is that it is dynamically stable but not statically stable.
The mechanics of locomotion
Walk cycle
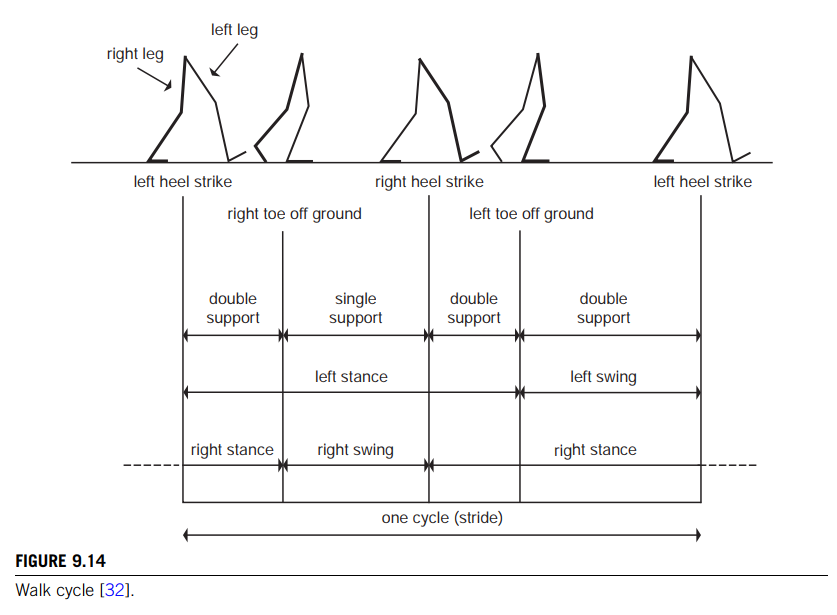
The walk cycle can be broken down into various phases [11] based on the relation of the feet to their points of contact with the ground (see Figure 9.14).
The stride is defined by the sequence of motions between two consecutive repetitions of a body configuration [32].
The left stance phase of a stride is initiated with the right foot on the ground and the left heel just starting to strike the ground. 右脚着地,左脚跟刚开始着地
The right swing phase is the period in which the right toe leaves the ground, the right leg swings forward, and the right heel strikes the ground. Notice that the right swing phase is a subinterval of the left stance phase.
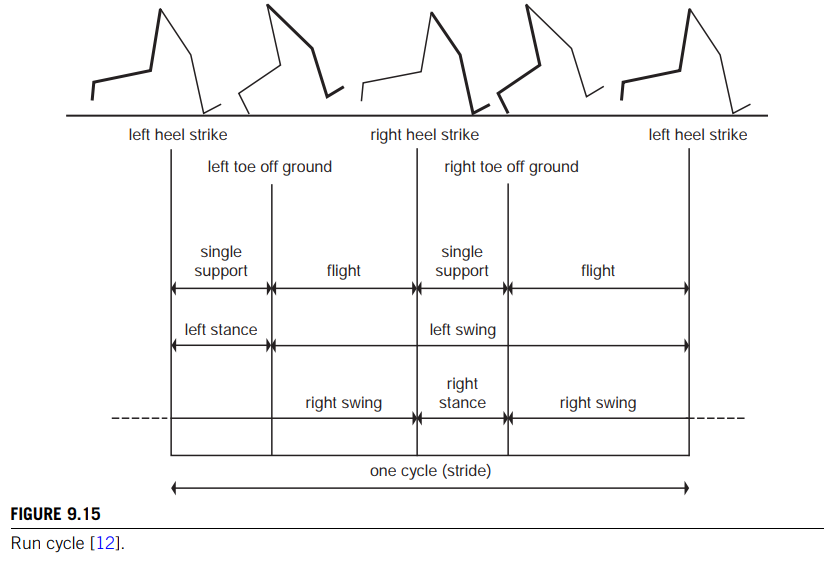
Run cycle
Pelvic transport
Figure 9.16 shows how the pelvis is supported by the stance leg at various points during the stance phase of the walk cycle.
Figure 9.17 shows these positions superposed during a full stride and illustrates the abutting of two-dimensional circular arcs describing the basic path of the pelvis as it is transported by the legs.
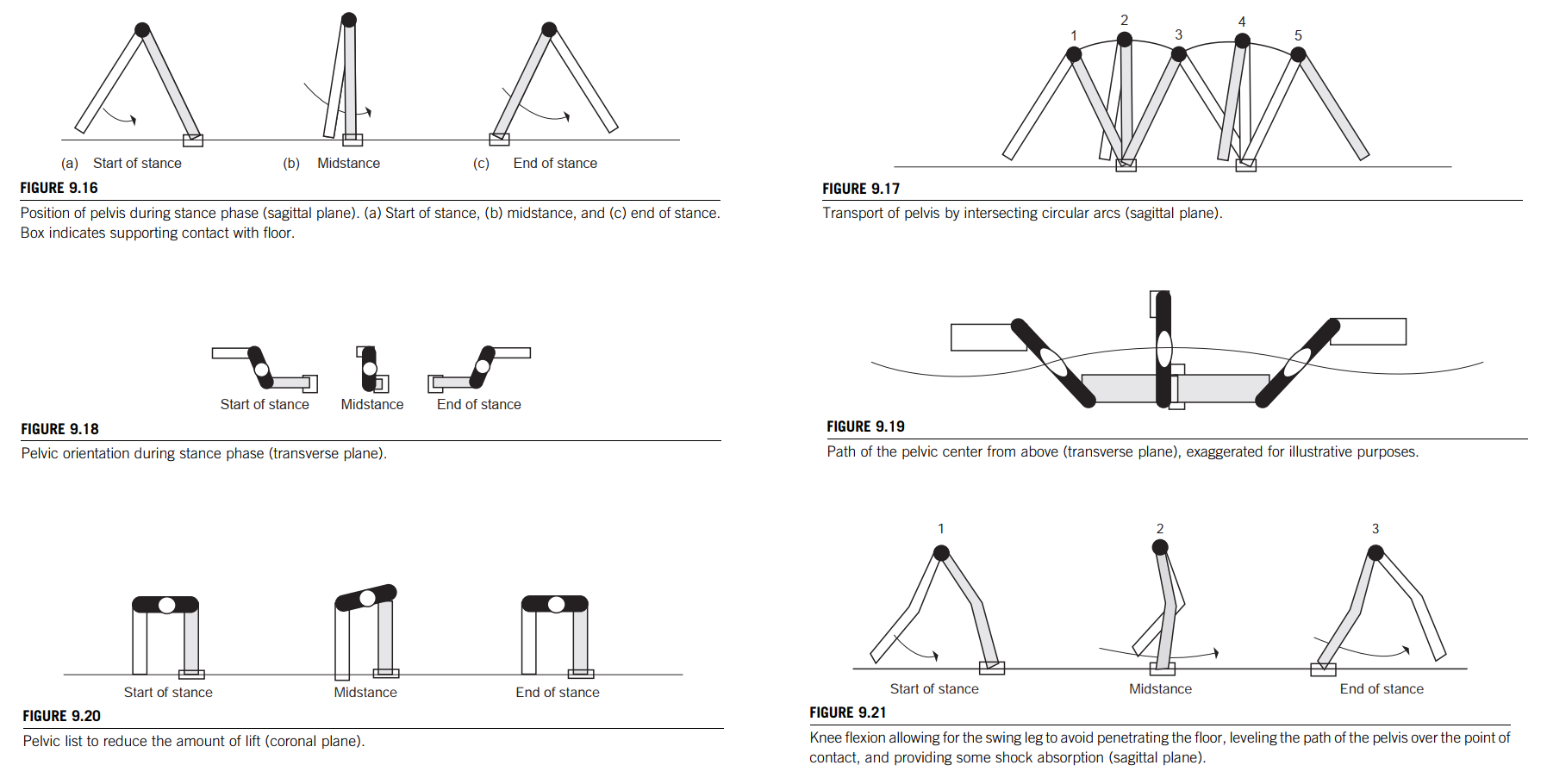
Pelvic rotation
Figure 9.18 shows the position of the pelvis during various points in the walking cycle, as viewed from above. The pelvis rotates about a vertical axis centered at the stance leg, helping to lengthen the stride as the swing leg stretches out for its new foot placement.
The top of the stance leg is rotating above the point of contact with the floor (Figure 9.18), so the path of the center of the pelvis resembles a sinusoidal curve (Figure 9.19).
Pelvic list
The kinematics of the walk
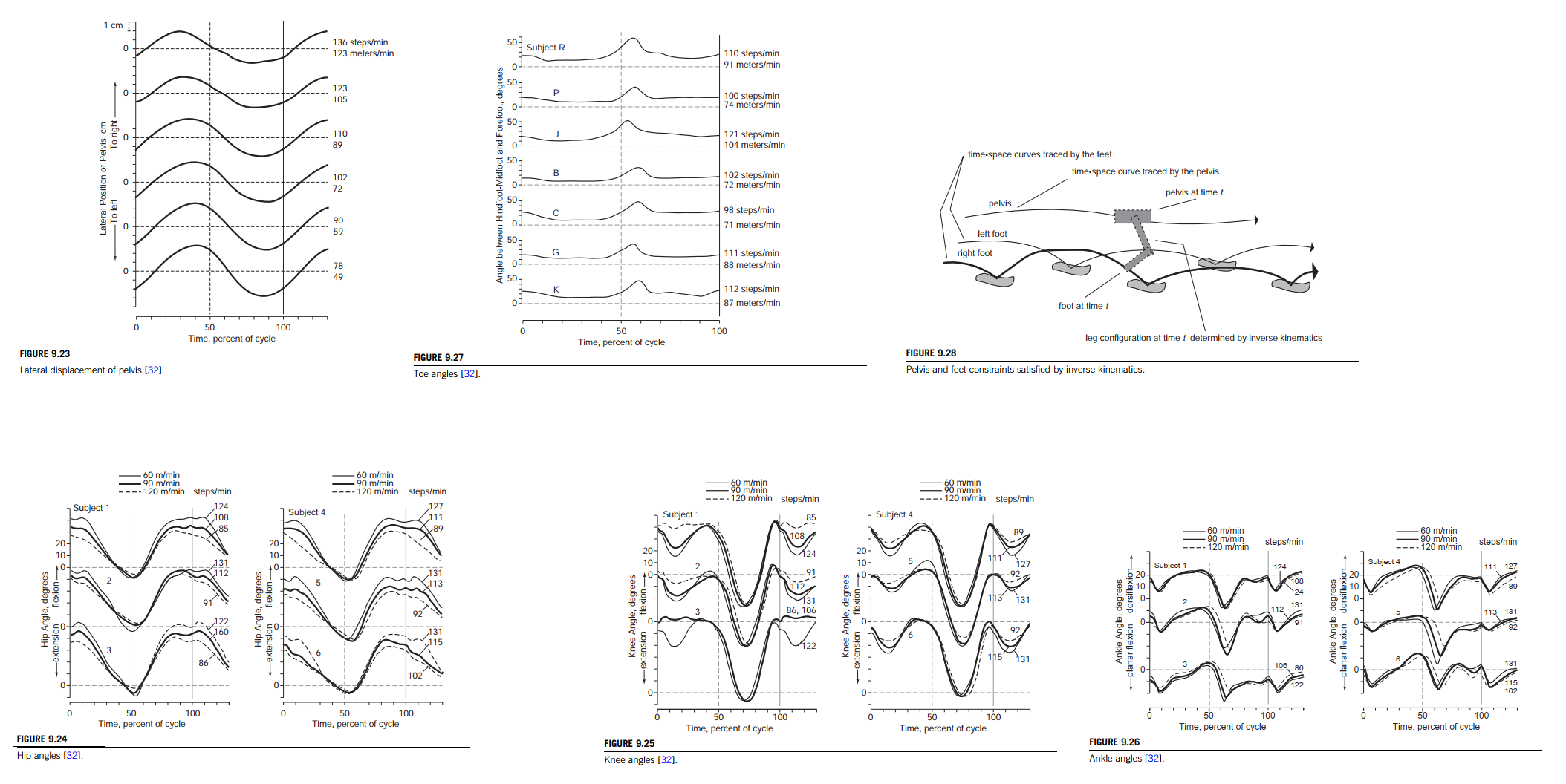
The most basic approach to generating the walking motion is for the animator to specify a list of joint angle values for each DOF involved in the walk. There are various sources for empirical data describing the kinematics of various walks at various speeds.
There are various sources for empirical data describing the kinematics of various walks at various speeds. Figures 9.23 through 9.27.
When creating new walks, the animator can specify kinematic values such as pelvic movement, foot placement, and foot trajectories. Inverse kinematics can be used to determine the angles of the intermediate joints [12].
By constructing the time-space curves traced by the pelvis and each foot, the user can determine the position of each for a given frame of the animation. Each leg can then be positioned by considering the pelvis fixed and the leg a linked appendage whose desired end-effector position is the corresponding position on the foot trajectory curve (Figure 9.28).
Using dynamics to help produce realistic motion
Dynamic simulation can be used to map specified actions and constraints to make the movement more accurate physically.
Forward dynamic control
In some cases, forward dynamic control instead of kinematic control can be effectively used. Kinematics still plays a role.
Coverings
Clothing
Real-time application, such as computer games, still often use virtual humans that sport rigid body armor that merely rotates along with whatever limb it is attached to.
High-end off-line animation systems are starting to offer advanced clothing simulation modules that attempt to calculate the effects of gravity as well as cloth–cloth and cloth–body collisions by using mass-spring networks or energy functions.
Hair
The most common, visually poor but computationally inexpensive technique has been to merely construct a rigid piece of geometry in the rough shape of the volume of hair and attach it to the top of the head, like a helmet, as in Figure 9.31. Texture maps with transparency information are sometimes used to improve the appearance, providing for a wispy boundary. FFDs can be used to animate the global shape of rigidly defined hair.


